
Habillage artisanal du robot.

Aujourd’hui j’ai décidé de mettre de côté toute la partie programmation car j’avais envie de changer l’apparence de mon robot. J’ai commencé par m’occuper de la tête et de fil en aiguille, j’ai habillé une partie du robot. Attention, cela reste artisanale comme procédé. Je m’en contenterais en attendant d’avoir un jour une imprimante 3D à ma disposition.
Nouvelle tête.

La première étape a été la tête. J’avais pris le temps pour tout fixer pourtant, mais je voulais tout changer et surtout simplifier la fixation de chaque composants.
L’idée a été simple. je suis parti d’une boite de DVD et utilisé la partie plane.

J’ai pris des mesures découpé le plastique,

et finalement chauffé pour donner la forme d’un carré. Je me suis inspiré de ce carré pour la tête du robot.

J’ai ensuite démonté la partie haute du robot afin de récupérer les différents composants.

Je les ai utilisé pour découper et percer le plastique aux emplacements nécessaires.

J’ai bien prévenu que c’était de l’artisanal.
Il ne restait plus qu’à placer les composants.

Et vu de derrière :
J’en ai profité pour percer les trous en face de la led intégrée au détecteur « ping » ainsi que celle intégrée à la caméra.

Parfait. La suite a été de monter cela sur le robot.

Après avoir rebranché les câbles, il y avait du changement.

Mais j’avoue que c’était beaucoup trop carré à mon goût. Il fallait trouver une solution. Avec un chapeau « la paille » aux couleurs locales :

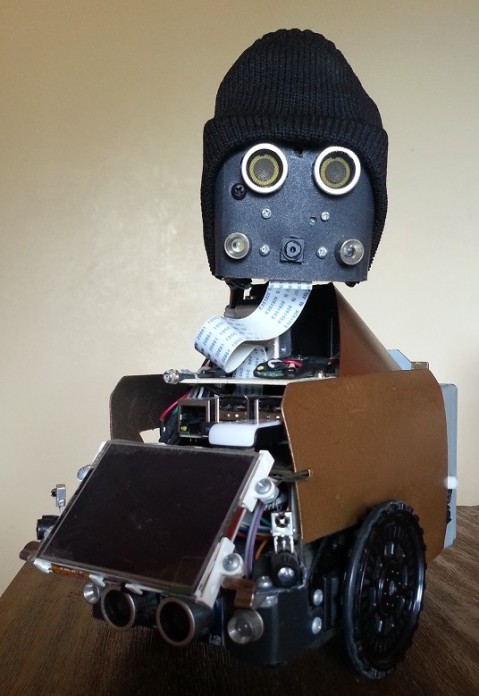
Pas mal mais ça fait un peu grand mère. Autre solution : la chaussette de récupération :

Yo man ! L’idée vient de mon fils. Ca en jette non ?

Le « bonnet » est fixé par un fil qui est attaché à chaque côté en dessous du « cube » formant la tête.
Cachons les câbles.
Du coup, cela me donnait l’impression que le robot était tout nu sur la partie basse. J’ai donc décidé de cacher simplement les câbles. Toujours en partant de mes boites de DVD de récupération, j’ai découpé, poncé puis peint à la bombe (il m’en restait un fond) :

J’ai ensuite monté ces « caches » sur le pèlerin. Chaque cache est tenu par deux vis :

et de l’autre côté (il manquerait juste un peu de décoration sur la façade pour agrémenter un peu) :

Dernière étape : cacher l’arrière de la tête. Toujours en utilisant le plastique, en faisant chauffer découpé et déformé puis peint :

et installation sur le robot :

Voilà pour le moment où j’en suis. cela donne le résultat suivant :


Officiellement baptisé Mark II.
Ce changement d’apparence accompagne ce qui a très récemment considérablement changé sur mon robot. Ce dernier est désormais composé d’une base « serveur » hébergeant un serveur web permettant de piloter le robot à distance depuis internet. Le robot intègre lui-même désormais la carte raspberry pi 2. J’ai donc décidé officiellement de baptiser mon robot le PLR1 Mark II (petit clin d’oeil à Olivier).
Je vais peut être inscrire cela sur la façade gauche qui fait un peu vide à mon goût. Il faut juste que je trouve la façon de l’écrire, mais je verrai cela plus tard.
Résumé du jour :
Voici une comparaison de l’ancienne et de la nouvelle version, du pèlerin :
Ce n’est pas non plus l’apothéose je vous l’accorde, mais personnellement, je préfère la nouvelle version. Le robot est un peu « habillé » même si cela reste artisanal. Je suis très satisfait du résultat.
Bien sûr, cela sera beaucoup mieux le jour où j’aurais une imprimante 3D à ma disposition. En effet, l’impression 3D me permettra de faire des formes arrondies et de prévoir les emplacements et fixations idéales pour chaque composant (écrans, moteurs etc…). Mais cela est une autre histoire qui ne se déroulera certainement pas dans l’immédiat.
A bientôt.
Une réponse à “Habillage artisanal du robot.”
Laisser un commentaire
Commentaires récents
| Bertrand Tcheutchoua dans La détection de visage avec Op… | |
| dj fridgerald dans Habillage artisanal du ro… | |
| Abdourhamane dans Piloter mon robot à la voix ou… | |
| djgsi974 dans La détection de visage avec Op… | |
| djgsi974 dans Connecter le raspberry pi à mo… |

Top suit l’évolution.